* RFC: bus_type and device_class merge (or partial merge)
@ 2002-12-19 19:36 Adam J. Richter
2002-12-19 20:37 ` Patrick Mochel
0 siblings, 1 reply; 7+ messages in thread
From: Adam J. Richter @ 2002-12-19 19:36 UTC (permalink / raw)
To: mochel; +Cc: linux-kernel
If there is a more specific mailing list than lkml for discussing
the generic driver model, please feel free to redirect me.
I'm thinking about trying to embed struct device_class into
struct bus_type or perhaps just eliminate the separate struct
bus_type. The two structures are almost identical, especially
considering that device_class.devnum appears not to be used by
anything.
struct bus_type {
char * name;
struct subsystem subsys;
struct subsystem drvsubsys;
struct subsystem devsubsys;
struct list_head devices;
struct list_head drivers;
int (*match)(struct device * dev, struct device_driver * drv);
struct device * (*add) (struct device * parent, char * bus_id);
int (*hotplug) (struct device *dev, char **envp,
int num_envp, char *buffer, int buffer_size);
};
struct device_class {
char * name;
u32 devnum;
struct subsystem subsys;
struct subsystem devsubsys;
struct subsystem drvsubsys;
struct list_head drivers;
struct list_head devices;
int (*add_device)(struct device *);
void (*remove_device)(struct device *);
int (*hotplug)(struct device *dev, char **envp,
int num_envp, char *buffer, int buffer_size);
};
At first appearance, a bus_type (PCI, USB, etc.) and a
device_class (network devices, input, block devices), may seem like
opposite ends of the device driver abstraction, but really I think
these are basically the same, and, more importantly, there can be many
layers of these interfaces, and the decision about which are bus_types
and which are device_classes is causing unnecessary coplexity. For
example, SCSI defines both. SCSI can be a hardware bus, bus it also
needs device_class so that scsi_debug (and eventually scsi generic) can
use the struct interface mechanism.
If you look at the five places where a struct device_class is
actually defined in 2.5.52, you'll see that either the device_class is
not referenced by anything else or it has no bus type. So, there
seems to be little use of the distinction.
device_class variable Referenced elsewhere? bus_type?
cpu_devclass No system_bus_type
memblk_devclass No system_bus_type
node_devclass No system_bus_type
input_devclass Yes (mousedev, tsdev) (None)
shost_devclass Yes (scsi_debug) (None)
Also, merging device_class and bus_type could also enable a
little more consolidation between struct device_interface and struct
device_driver (as with device_class.devnum, device_interface.devnum
does not appear to be used currently).
Anyhow, I think this could shrink the drivers/base a bit and
make it slightly more understandable. I'd be interested in knowing if
anyone else is contemplating or developing this or wants to point out
issues to watch out for.
Adam J. Richter __ ______________ 575 Oroville Road
adam@yggdrasil.com \ / Milpitas, California 95035
+1 408 309-6081 | g g d r a s i l United States of America
"Free Software For The Rest Of Us."
^ permalink raw reply [flat|nested] 7+ messages in thread* Re: RFC: bus_type and device_class merge (or partial merge)
2002-12-19 19:36 RFC: bus_type and device_class merge (or partial merge) Adam J. Richter
@ 2002-12-19 20:37 ` Patrick Mochel
2002-12-19 22:44 ` Adam J. Richter
0 siblings, 1 reply; 7+ messages in thread
From: Patrick Mochel @ 2002-12-19 20:37 UTC (permalink / raw)
To: Adam J. Richter; +Cc: linux-kernel
> If there is a more specific mailing list than lkml for discussing
> the generic driver model, please feel free to redirect me.
No, the kernel list is right. I'm a lazy bastard that travels a lot, so
response latency is often higher than it should be.
> I'm thinking about trying to embed struct device_class into
> struct bus_type or perhaps just eliminate the separate struct
> bus_type. The two structures are almost identical, especially
> considering that device_class.devnum appears not to be used by
> anything.
Someone else tried to do this a while back, and my argument was the same
as this is going to be: they are very distinct objects that describe
different things.
It is true that classes are not used much in the current kernel. The last
six months have not afforded enough time to convert as much code to use
them as I would have preferred. As a result, the class and interface code
is the least mature (and the least personally liked) of the driver model
code.
If you're interested, I've finished a paper for linux.conf.au on the
driver model that should describe the various objects and purposes (much
better than the Ottawa paper did). You can find it at:
http://kernel.org/pub/linux/kernel/people/mochel/doc/lca/driver-model-lca2003.tar.gz
Hopefully, you will find it useful. Feel free to send me comments on it,
as it may just be completely crappy.
> At first appearance, a bus_type (PCI, USB, etc.) and a
> device_class (network devices, input, block devices), may seem like
> opposite ends of the device driver abstraction, but really I think
> these are basically the same, and, more importantly, there can be many
> layers of these interfaces, and the decision about which are bus_types
> and which are device_classes is causing unnecessary coplexity. For
> example, SCSI defines both. SCSI can be a hardware bus, bus it also
> needs device_class so that scsi_debug (and eventually scsi generic) can
> use the struct interface mechanism.
They're not the same, though. They may be similar, but they are
fundamentally different.
A bus describes a physical transport. It defines semantics for
communicating with resident devices, independent of the functionality they
ultimately serve.
A class is the flipside. It describes the function a device is designed
to perform, independent of its underlying transport.
The interfaces that communicate with devices of a particular class are the
canonical entities that give devices meaning to users and userspace
programs.
Consider audio devices. The only things I care about are /dev/mixer and
/dev/dsp, which map to devices registered with the audio subsystem.
Actually, what is registered are not devices. They are objects allocated
by the driver for my sound card that describe the device in the context of
the audio subsystem. This object is independent of the bus the device
resides on. Communication from userspace to the device passes through the
driver, which formats the class requests to bus and device-specific ones
to actaully talk to the physical device. Something like this:
Me -> device node -> kernel intf -> audio subsys -> driver -> bus -> device
Some buses allow communication to devices on their bus type, regardless of
the devices' function. SCSI does this, as you mention, and so does PCI and
USB, via /proc/bus/*. Functionality is limited to what can generically be
done, and what the bus type allows you to do. They are not classes,
though. The interfaces they correspond to are specific to the underlying
transport.
SCSI is wrong about creating a device class. They are overloading
constructs for their own, twisted purposes. It's partly my fault, as I
know they could use a mechanism for registering and exporting interfaces
to bus-specific devices. It hasn't happened mainly because of time
constraints.
> Also, merging device_class and bus_type could also enable a
> little more consolidation between struct device_interface and struct
> device_driver (as with device_class.devnum, device_interface.devnum
> does not appear to be used currently).
>
> Anyhow, I think this could shrink the drivers/base a bit and
> make it slightly more understandable. I'd be interested in knowing if
> anyone else is contemplating or developing this or wants to point out
> issues to watch out for.
Consolidation is possible, but I would not recommend doing it by merging
the structures. Look for other ways to create common objects that the two
can share. The distinction between the object types is important,
conceptually, if nothing else. Especially during the continuing evolution
of the model. At least for now, and for probably a very long time, I will
not consider patches to consolidate the two object types.
-pat
^ permalink raw reply [flat|nested] 7+ messages in thread
* Re: RFC: bus_type and device_class merge (or partial merge)
@ 2002-12-19 22:44 ` Adam J. Richter
2002-12-19 23:37 ` Greg KH
2002-12-20 4:29 ` Patrick Mochel
0 siblings, 2 replies; 7+ messages in thread
From: Adam J. Richter @ 2002-12-19 22:44 UTC (permalink / raw)
To: mochel; +Cc: linux-kernel
>> = Adam Richter
> = Patrick Mochel
>> I'm thinking about trying to embed struct device_class into
>> struct bus_type or perhaps just eliminate the separate struct
>> bus_type. The two structures are almost identical, especially
>> considering that device_class.devnum appears not to be used by
>> anything.
>
>Someone else tried to do this a while back, and my argument was the same
>as this is going to be: they are very distinct objects that describe
>different things.
A philosophical musing is not substitute for identifying real
technical advantages or disadvantages, but thanks for the response.
If my proposed changes shrink kernel memory footprint, improve
code maintainability, allow multiple drivers per device (e.g., scsi
generic and scsi disk), users will be better off with those advantages
than being lost in a doctrine for which they've lost track of the benefits.
Also, thanks for the pointer to the paper. I've only skimmed
it at this point, but it at already has helped clarify your thinking
on struct subsystem for me.
>They're not the same, though. They may be similar, but they are
>fundamentally different.
There are also differences between USB and PCI, but that
doesn't mean that the part that is handled by drivers/base has to be
different. The question is whether having separate implementations
for a set of differences make the code smaller, faster, more
functional, or delivers other real benefits that tip the trade-off.
>A class is the flipside. It describes the function a device is designed
>to perform, independent of its underlying transport.
You see it as the "flipside" because you're used to seeing
only two levels of indirection (you also haven't shown a real benefit
to a different interface). Let's look at your example:
>Consider audio devices. The only things I care about are /dev/mixer and
>/dev/dsp, which map to devices registered with the audio subsystem.
>Actually, what is registered are not devices. They are objects allocated
>by the driver for my sound card that describe the device in the context of
>the audio subsystem. This object is independent of the bus the device
>resides on. Communication from userspace to the device passes through the
>driver, which formats the class requests to bus and device-specific ones
>to actaully talk to the physical device. Something like this:
>
>
> Me -> device node -> kernel intf -> audio subsys -> driver -> bus -> device
Even in this example, there could be many gradations between
bus_type and device_class. There can be hardware support for complex
sound synthesis and there can be software versions of that same
interface to support more ordinary sound cards. Sound cards are a
good example of a type of device that can have separate but related
functions, so it may be handy to have device drivers that are written
to accomodate multiple drivers per device (although I would agree that
the _default_ policy should remain only one driver per device at this
point). The audio hardware may also be located across multiple busses
(PCI --> USB --> USB audio) or may involve more software (PC speaker
driver).
Perhaps it would help you to understand the impetus that made
me think about this. I want to have a mechanism for race-free module
unloading without a new lowest level locking primitive (i.e., just by
using rw_semaphore). To make its use transparent for most cases, I
want add a field to struct device_driver and add a couple of lines to
{,un}register_driver, and I see that if I have to duplicate this
effort if I want the same thing for, say, converting filesystems to
use the generic driver interface. I don't see that duplication buying
any real improvement in speed, kernel footprint, source code size,
etc. In other words, having two separate interfaces makes it harder
to write other facilities that are potentially generic to
driver/target rendezvous.
Anyhow, if you don't convince me of the error of my ways, then
it's probably incumbent upon me to produce a patch before whining
further.
>Consolidation is possible, but I would not recommend doing it by merging
>the structures. Look for other ways to create common objects that the two
>can share.
I'm thinking about this. I just wonder if there would be any
remaining fields that would not be common.
>The distinction between the object types is important,
>conceptually, if nothing else.
If it is not important for any other reason, then it's just a
lost opportunity for code shrink and perhaps for potentially making
the facility generically useful in new ways.
>Especially during the continuing evolution
>of the model. At least for now, and for probably a very long time, I will
>not consider patches to consolidate the two object types.
Linux will be better if we decide things by weighing technical
benefits rather than by attempts at diktat. I recommend you keep an
open mind about it.
Adam J. Richter __ ______________ 575 Oroville Road
adam@yggdrasil.com \ / Milpitas, California 95035
+1 408 309-6081 | g g d r a s i l United States of America
"Free Software For The Rest Of Us."
^ permalink raw reply [flat|nested] 7+ messages in thread* Re: RFC: bus_type and device_class merge (or partial merge)
2002-12-19 22:44 ` Adam J. Richter
@ 2002-12-19 23:37 ` Greg KH
2002-12-20 4:29 ` Patrick Mochel
1 sibling, 0 replies; 7+ messages in thread
From: Greg KH @ 2002-12-19 23:37 UTC (permalink / raw)
To: Adam J. Richter; +Cc: mochel, linux-kernel
On Thu, Dec 19, 2002 at 02:44:53PM -0800, Adam J. Richter wrote:
> >> = Adam Richter
> > = Patrick Mochel
>
> >Especially during the continuing evolution
> >of the model. At least for now, and for probably a very long time, I will
> >not consider patches to consolidate the two object types.
>
> Linux will be better if we decide things by weighing technical
> benefits rather than by attempts at diktat. I recommend you keep an
> open mind about it.
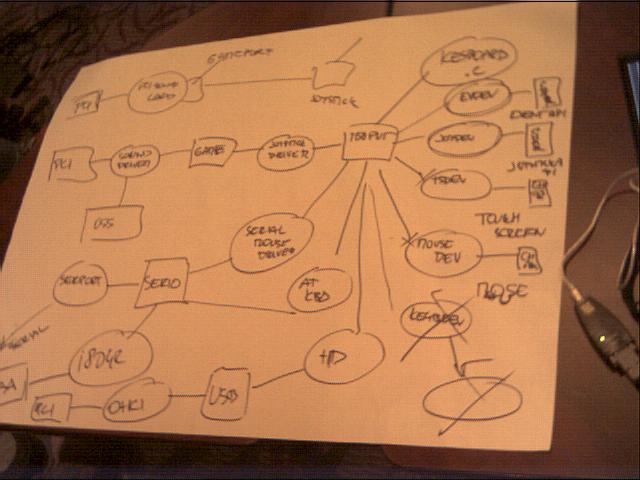
Heh, if anyone has kept an open mind around here, it's Pat. Look at the
crap that the driver writers have forced him to accommodate. Here's a
small drawing that some people did at OLS 2002 to help get across how
all of the wide range of busses, classes, devices, and drivers interact
with just one kind of subsystem:
http://www.kroah.com/linux/images/driver_model_1_ols_2002.jpg
The existing code handles monstrosities like that quite well, because he
has kept an open mind, and listened to the driver and subsystem authors.
And yes, we need to start writing more class support, it's next on my
list too. Patches to do this would be greatly appreciated.
thanks,
greg k-h
^ permalink raw reply [flat|nested] 7+ messages in thread
* Re: RFC: bus_type and device_class merge (or partial merge)
2002-12-19 22:44 ` Adam J. Richter
2002-12-19 23:37 ` Greg KH
@ 2002-12-20 4:29 ` Patrick Mochel
1 sibling, 0 replies; 7+ messages in thread
From: Patrick Mochel @ 2002-12-20 4:29 UTC (permalink / raw)
To: Adam J. Richter; +Cc: linux-kernel
> A philosophical musing is not substitute for identifying real
> technical advantages or disadvantages, but thanks for the response.
Ouch.
> If my proposed changes shrink kernel memory footprint, improve
> code maintainability, allow multiple drivers per device (e.g., scsi
> generic and scsi disk), users will be better off with those advantages
> than being lost in a doctrine for which they've lost track of the benefits.
You're trying to pinch pennies with the footprint you're talking about.
The extra structure definition costs nothing, and the code to interface
those objects with the other driver model objects is trivial.
Plus, you'd be overloading the object to behave differently depending on
how it was referenced, causing more code. That certainly wouldn't improve
code maintainability.
A device belongs to exactly one bus type and exactly one class type. This
is easy to express. If you combine the objects, you either reference each
instance explicitly, kinda like they are now, or you represent it in some
list, which will complicate the existing code immensely.
What problem would that solve? How would that allow you to bind multiple
drivers to a device? Why would you want to do that anyway?
To support scsi-generic? I've talked with SCSI people before about this.
It's bad to treat it as a driver, because it causes the core to special
case these wacky instances where you have an extension of the bus driver
apply to each device registered with it. I've gotten verbal confirmation
that scsi-generic will change in this regard, and I've offered to provide
hooks to make this easier to express.
For the record, both USB and PCI do similar things. USB creates procfs
entries, and can create device nodes. IIRC, USB makes an explicit call to
the function that does this. PCI makes an explicit call to create procfs
entries for each PCI device. They could all be implemented as 'drivers'
but it doesn't make sense to overload the objects to do it this way.
> >They're not the same, though. They may be similar, but they are
> >fundamentally different.
>
> There are also differences between USB and PCI, but that
> doesn't mean that the part that is handled by drivers/base has to be
> different. The question is whether having separate implementations
> for a set of differences make the code smaller, faster, more
> functional, or delivers other real benefits that tip the trade-off.
Why? Why try to micro-optimize the core now? You'll gain much more by
converting bus and class drivers to use the driver model objects, and
reducing the replication in the dusty corners of the kernel.
> Perhaps it would help you to understand the impetus that made
> me think about this. I want to have a mechanism for race-free module
> unloading without a new lowest level locking primitive (i.e., just by
> using rw_semaphore). To make its use transparent for most cases, I
> want add a field to struct device_driver and add a couple of lines to
> {,un}register_driver, and I see that if I have to duplicate this
> effort if I want the same thing for, say, converting filesystems to
> use the generic driver interface. I don't see that duplication buying
> any real improvement in speed, kernel footprint, source code size,
> etc. In other words, having two separate interfaces makes it harder
> to write other facilities that are potentially generic to
> driver/target rendezvous.
Fine. That would be nice. You definitely have good intentions, but there
is much more work to be done, that is far less glamorous, that I am
concerned with.
> >Consolidation is possible, but I would not recommend doing it by merging
> >the structures. Look for other ways to create common objects that the two
> >can share.
>
> I'm thinking about this. I just wonder if there would be any
> remaining fields that would not be common.
Even if there are not, they have different purposes, and different
semantics for dealing with them. Please do not play God on them, they are
there for specific purposes.
> >Especially during the continuing evolution
> >of the model. At least for now, and for probably a very long time, I will
> >not consider patches to consolidate the two object types.
>
> Linux will be better if we decide things by weighing technical
> benefits rather than by attempts at diktat. I recommend you keep an
> open mind about it.
I like to think I do have an open mind. I listen to what everyone says,
good or bad, and save it all. Well, most. I am definitely not the one to
have a closed mind, since I know for a fact most of the people that rant
and rave have much more experience with this stuff than I do.
I may not respond to everything, and it may appear I ignore things, but
it's only because I am weighing and contemplating them, and their
responses. I may not know the low-level details about many things, but
I've spent enough of the last two years comparing and analyzing the
behavior of drivers to mean it when I say I will not consider patches of
that type. :)
-pat
^ permalink raw reply [flat|nested] 7+ messages in thread
* Re: RFC: bus_type and device_class merge (or partial merge)
@ 2002-12-21 9:00 Adam J. Richter
0 siblings, 0 replies; 7+ messages in thread
From: Adam J. Richter @ 2002-12-21 9:00 UTC (permalink / raw)
To: mochel; +Cc: linux-kernel
[-- Attachment #1: Type: text/plain, Size: 1005 bytes --]
>If you're interested, I've finished a paper for linux.conf.au on the
>driver model that should describe the various objects and purposes (much
>better than the Ottawa paper did). You can find it at:
>
>http://kernel.org/pub/linux/kernel/people/mochel/doc/lca/driver-model-lca2003.tar.gz
Thanks. I've read it now. Here is a proposed patch. The
only substantive change is a correction to the misunderstanding about
the risk of bus driver modules being unloaded (you might want to
delete the second paragraph that I added). I've cc'ed linux-kernel
as others might want to comment that proposed change.
The other changes are just typos and one TeX quirk (apparentlyd
underscores don't have to be escaped in "verbatim" sections).
--
Adam J. Richter __ ______________ 575 Oroville Road
adam@yggdrasil.com \ / Milpitas, California 95035
+1 408 309-6081 | g g d r a s i l United States of America
"Free Software For The Rest Of Us."
[-- Attachment #2: diffs --]
[-- Type: text/plain, Size: 6668 bytes --]
diff -u -r driver-model-lca2003/source/buses.tex driver-model-lca2003.modified/source/buses.tex
--- driver-model-lca2003/source/buses.tex 2002-12-18 09:57:33.000000000 -0800
+++ driver-model-lca2003.modified/source/buses.tex 2002-12-21 00:57:20.000000000 -0800
@@ -211,24 +211,28 @@
\end{table}
-There are two caveats of using bus drivers as they are currently
-implemented in the driver model . First, the de facto means of
-referencing a bus driver is via a pointer to its struct
-bus\_type. This implies that the bus drivers must not declare the
-object as 'static' and must be explicitly exported for modules to
-use. An alternative is to provide a helper that searches for and
-returns a bus with a specified name. This is a more desirable solution
-from an abstraction perspective, and will likely be added to the
-model.
-
-Secondly, bus drivers contain no internal means of preventing their
-module to unload while their reference count is positive. This causes
-the referring object to access invalid memory if the module is
-unloaded. The proposed solution is to use a semaphore, like device
-drivers contain, that bus\_unregister() waits on, and is only unlocked
-when the reference count reaches 0. This will be fixed in the near
-future.
-
+A bus driver is referenced via a pointer to its struct bus\_type. This
+implies that the bus drivers must not declare the object as 'static'
+and that it must be explicitly exported for modules to use. The reference
+to the bus driver's struct bus\_type means that the bus driver module
+will automatically be loaded by modprobe before any users of that
+bus type. It also means that the dependency code built into the
+kernel module system will prevent a bus driver from being unloaded
+until all device drivers for that bus are unloaded, elmininating the
+need to reference counting or other locking schemes.
+
+An alternative is to provide a helper that searches for and
+returns a bus with a specified name, which might be useful with,
+for example, a module that contained drivers for PCI and
+MicroChannel versions of a device and one wanted to build a kernel
+with support for both drivers built in and then run this driver
+in a situtation where, say, the MicroChannel bus module was not
+available (for example on a customized ram disk). However, if this
+were really necessary, then splitting such a module into bus specific
+parts and a ``core'' would reduce kernel footprint and probably result
+in less complexity than implementing run-time lookup of bus types,
+and developing a scheme for rebinding such a driver if, for example,
+the microchannel bus driver is loaded later.
\subsection*{Driver Binding}
@@ -339,16 +343,16 @@
\begin{footnotesize}
\begin{verbatim}
-struct callback\_data {
+struct callback_data {
struct device * dev;
char * id;
};
static int callback(struct device * dev, void * data)
{
- struct callback\_data * cd = (struct callback\_data *)data;
- if (!strcmp(dev->bus\_id,cd->id)) {
- cd->dev = get\_device(dev);
+ struct callback_data * cd = data;
+ if (!strcmp(dev->bus_id,cd->id)) {
+ cd->dev = get_device(dev);
return 1;
}
return 0;
@@ -356,15 +360,15 @@
static int caller(void)
{
- struct callback\_data data = {
+ struct callback_data data = {
.id = "00:00.0",
};
/* find PCI device with ID 00:00.0 */
- if(bus\_for\_each\_dev(&pci\_bus\_type,&data,callback)) {
+ if(bus_for_each_dev(&pci_bus_type,&data,callback)) {
struct device * dev = data.dev;
/* fiddle with device */
- put\_device(dev);
+ put_device(dev);
}
}
diff -u -r driver-model-lca2003/source/classes.tex driver-model-lca2003.modified/source/classes.tex
--- driver-model-lca2003/source/classes.tex 2002-12-18 11:53:00.000000000 -0800
+++ driver-model-lca2003.modified/source/classes.tex 2002-12-21 00:07:01.000000000 -0800
@@ -122,10 +122,10 @@
Struct device\_class most closely resembles struct bus\_type. Indeed,
-many of the fields of struct device\_class server a similar purpose as
+many of the fields of struct device\_class serve a similar purpose as
those in struct bus\_type. The subordinate subsystem 'devsubsys' and
the 'devices' list manage the list of devices registered with the
-class. Like with buses, these structures must exist in parallel, since
+class. As with buses, these structures must exist in parallel, since
a kobject may not belong to more than one subsystem at a time. The
same is true of the 'drvsubsys' and 'drivers' list with regard to
drivers registered with the classes.
diff -u -r driver-model-lca2003/source/devices.tex driver-model-lca2003.modified/source/devices.tex
--- driver-model-lca2003/source/devices.tex 2002-12-18 11:35:06.000000000 -0800
+++ driver-model-lca2003.modified/source/devices.tex 2002-12-20 08:35:20.000000000 -0800
@@ -63,7 +63,7 @@
saved\_state & void * & Pointer to saved state for device. \\\hline
-dma\_mask & dma\_mask\_t * & DMA address mask the device
+dma\_mask & dma\_mask\_t & DMA address mask the device
can support.\\\hline
\end{tabularx} \\
diff -u -r driver-model-lca2003/source/platform.tex driver-model-lca2003.modified/source/platform.tex
--- driver-model-lca2003/source/platform.tex 2002-12-18 10:33:57.000000000 -0800
+++ driver-model-lca2003.modified/source/platform.tex 2002-12-21 00:08:28.000000000 -0800
@@ -216,7 +216,7 @@
cause problems, though, when a driver is running on a platform where
the ports to probe for existence are different. It doesn't even have
to be different architectures, only different revisions of the same
-platform. Probing undefined I/O ports is dangerous and cause very
+platform. Probing undefined I/O ports is dangerous and causes very
unpredictable behavior. It can also be a very slow process, and
significantly delay the boot process.
diff -u -r driver-model-lca2003/source/sysfs.tex driver-model-lca2003.modified/source/sysfs.tex
--- driver-model-lca2003/source/sysfs.tex 2002-12-18 09:57:33.000000000 -0800
+++ driver-model-lca2003.modified/source/sysfs.tex 2002-12-20 08:34:42.000000000 -0800
@@ -74,7 +74,7 @@
sysfs has been a standard part of the Linux kernel as of version
2.5.45. It has existed under a different name (driverfs or ddfs) since
kernel version 2.5.2. The de-facto standard mount point for sysfs is a
-new directory named '/sys'. It may be mounted from user pace by doing:
+new directory named '/sys'. It may be mounted from user space by doing:
\begin{alltt}
^ permalink raw reply [flat|nested] 7+ messages in thread* Re: RFC: bus_type and device_class merge (or partial merge)
@ 2002-12-21 10:43 Adam J. Richter
0 siblings, 0 replies; 7+ messages in thread
From: Adam J. Richter @ 2002-12-21 10:43 UTC (permalink / raw)
To: mochel; +Cc: linux-kernel
On Thu, 19 Dec 2002 22:29:39 -0600 (CST), Patrick Mochel wrote:
>> A philosophical musing is not substitute for identifying real
>> technical advantages or disadvantages, but thanks for the response.
>Ouch.
Sorry for the harsh tone. For what it's worth, I advocate the
generic device model. For example, I recently posted a proposed port
of pa-risc devices to it (although it looks like it will not be
integrated because the developers do not like struct kobject and
subsystem being so big).
>> If my proposed changes shrink kernel memory footprint, improve
>> code maintainability, allow multiple drivers per device (e.g., scsi
>> generic and scsi disk), users will be better off with those advantages
>> than being lost in a doctrine for which they've lost track of the benefits.
>You're trying to pinch pennies with the footprint you're talking about.
>The extra structure definition costs nothing, and the code to interface
>those objects with the other driver model objects is trivial.
True, but drivers/base is mandatory for everything including
wristwatch implementations, and these things add up to the point where
they can tip the balance in favor of VxWorks et al, so I think these
little optimizations are often worthwhile, even if we're only talking
about 2kB (text+data size of class.o). In general, if you want small
code, you need to have the discipline to go after lots of little
bloats.
>Plus, you'd be overloading the object to behave differently depending on
>how it was referenced, causing more code. That certainly wouldn't improve
>code maintainability.
Huh? I'd like to understand what you mean in that first
sentence. Can you walk through a hypothetical example? I expect the
changes that I have in mind to decrease overall code size (even if
only slightly).
More importantly, I expect the changes that I have in mind
to reduce the total amount of code that needs to be maintained and
to make it easier to write other facilities that use the generic
device layer (see below for examples).
>A device belongs to exactly one bus type and exactly one class type.
I have a Radeon All-In-Wonder 7500 card in my livingroom.
It appears as a single PCI device in lspci, but has the functionality
of three different device_classes (imagine these things ported to the
driver model):
- frambuffer_devclass
- video4linux_devclass
- audio_devclass
From this example, it seems to me that that one device does
not necessarily belong to exactly one devclass, but I think that can
be made true of each struct intf_data under your scheme (under my
approach struct intf_data would be replaced by struct device for
another bus_type, such as netdevice_bus_type or gendisk_bus_type).
>This
>is easy to express. If you combine the objects, you either reference each
>instance explicitly, kinda like they are now,
I don't understand this clause.
>or you represent it in some
>list, which will complicate the existing code immensely.
>What problem would that solve?
Reducing the complexity of scsi-generic, scsi-debug, usbdevfs,
etc. by allowing them to use the rendezvous code of drivers/base, as
measured, say, in line count of these individual facilities and total
kernel line count. I believe I know how to do this without changing
the source code of regular "exclusive" drivers.
>How would that allow you to bind multiple drivers to a device?
I imagine combining device_driver and device_interface in a
way that more resembles device_interface.
Something like this (maybe convert to kobject/subsystem for
sysfs support):
struct device_driver {
...
int share_dev : 1;
};
/* Note that a driver could register multiple nexi for the
same <device,driver> pair but different interfaces (e.g., scsi_disk,
scsi_generic). */
struct dev_drv_nexus { /* Replaces intf_data */
struct device_driver * driver;
struct device * dev;
void * driver_data;
struct list_head same_dev, same_driver;
};
sturct device {
/* Delete device.driver, device.driver_data. */
/* A maximum of one driver with share_dev==0 can be bound to a
device, and it must always be the first device on the list
(share_dev==1 drivers are added at the tail of the list;
share_dev==0 drivers are added at the front of the list). */
struct subsystem nexi;
};
extern struct dev_drv_nexus *dev_unshared_nexus(struct device *dev)
static inline struct nexus *dev_unshared_nexus(struct device *dev)
{
struct dev_drv_nexus *nexus;
BUG_ON(list_empty(&dev->nexi));
nexus = list_entry(dev->nexi->next, struct nexus, same_dev);
BUG_ON(nexus->driver->share_dev);
return nexus;
}
/* Only for use by drivers that have share_dev==0 */
static inline void *dev_get_drvdata(struct device *dev)
{
return dev_unshared_nexus(dev)->driver_data;
}
/* Only for use by drivers that have share_dev==0 */
static inline void dev_get_drvdata(struct device *dev, void *driver_data)
{
dev_unshared_nexus(dev)->driver_data->driver_data = driver_data;
}
>Why would you want to do that anyway?
>To support scsi-generic?
That's one example, yes.
>I've talked with SCSI people before about this.
>It's bad to treat it as a driver, because it causes the core to special
>case these wacky instances where you have an extension of the bus driver
>apply to each device registered with it. I've gotten verbal confirmation
>that scsi-generic will change in this regard, and I've offered to provide
>hooks to make this easier to express.
From this message by Mike Anderson on November 7, I think what
you only heard a reflection of what you said because what you said
wasn't really understood:
http://marc.theaimsgroup.com/?l=linux-scsi&m=103669541704163&w=2
>For the record, both USB and PCI do similar things. USB creates procfs
>entries, and can create device nodes.
Yes, these are other, similar examples. I would like to be
able to load and unload usbdevfs through the generic driver API.
>IIRC, USB makes an explicit call to
>the function that does this. PCI makes an explicit call to create procfs
>entries for each PCI device. They could all be implemented as 'drivers'
>but it doesn't make sense to overload the objects to do it this way.
I don't understand what you mean by "doesn't make sense." If
you could express your point in terms of underlying advantages
(source code size, speed, memory footprint, etc.) it will save you
iterations of email.
>> >They're not the same, though. They may be similar, but they are
>> >fundamentally different.
>>
>> There are also differences between USB and PCI, but that
>> doesn't mean that the part that is handled by drivers/base has to be
>> different. The question is whether having separate implementations
>> for a set of differences make the code smaller, faster, more
>> functional, or delivers other real benefits that tip the trade-off.
>Why? Why try to micro-optimize the core now?
Because it can be done in less programmer time now before more
code is ported to it, and, more importantly, it would enable or simplify
a number of facilities that I want to add.
>You'll gain much more by
>converting bus and class drivers to use the driver model objects, and
>reducing the replication in the dusty corners of the kernel.
>> Perhaps it would help you to understand the impetus that made
>> me think about this. I want to have a mechanism for race-free module
>> unloading without a new lowest level locking primitive (i.e., just by
>> using rw_semaphore). To make its use transparent for most cases, I
>> want add a field to struct device_driver and add a couple of lines to
>> {,un}register_driver, and I see that if I have to duplicate this
>> effort if I want the same thing for, say, converting filesystems to
>> use the generic driver interface. I don't see that duplication buying
>> any real improvement in speed, kernel footprint, source code size,
>> etc. In other words, having two separate interfaces makes it harder
>> to write other facilities that are potentially generic to
>> driver/target rendezvous.
>Fine. That would be nice. You definitely have good intentions, but there
>is much more work to be done, that is far less glamorous, that I am
>concerned with.
If you see a long time horizon on one what I want to do, it's
only from maintainer inertia. I'm not predicating my plans on any
maintainer doing more than integrating patches, or any other deveoper
doing more than occasionally reporting their experiences. I have
posted some pseudo-code for this and several other facilities that
would rely on the genericness of drivers/base code:
Pseudo-code for raceless module unloading without a new locking primitive
(would have to duplicate for device_driver and device_interface):
http://marc.theaimsgroup.com/?l=linux-kernel&m=103773401411324&w=2
Patch for preallocating dev->driver_private for many devices, mostly to
conslidate untested error legs (would have to duplicate for
device_driver and device_interface):
http://marc.theaimsgroup.com/?l=linux-kernel&m=103626558708431&w=2
Likewise for the static DMA consistent memory area (might duplicate for
device_driver and device_interface or do without for device_interface):
http://marc.theaimsgroup.com/?l=linux-kernel&m=103636338527053&w=2
Pseudo-code for string-based generic device ID matching (would have
to duplicate for device_driver nd device_interface if things like
filesystems use device_interface rather than device_driver):
http://marc.theaimsgroup.com/?l=linux-kernel&m=103828651528556&w=2
Duplicating these facilities for struct device_driver and
struct device_interface adds unnecessarily to source and object size.
Also, if any similar facility is developed that wants to use multiple
operands that could be bus_type/device_classs or
device_driver/device_interface, then the size of its API may have
to grow exponentially.
This is just stuff that I want to do imminently. What other
people want to do or might want to do in the near future is probably
larger. I think the only reason that we don't yet see many new
abstractions that use the generic driver code is because it's new.
>> >Consolidation is possible, but I would not recommend doing it by merging
>> >the structures. Look for other ways to create common objects that the two
>> >can share.
>>
>> I'm thinking about this. I just wonder if there would be any
>> remaining fields that would not be common.
>Even if there are not, they have different purposes, and different
>semantics for dealing with them. Please do not play God on them, they are
>there for specific purposes.
"Purpose" just refers to someone's state of mind at some point
in the past. The optimal technical trade-offs are generally not
determined by that, and making those trade-offs is not "playing God",
even when it involves editing code that you wrote. So far, you have
not identified any real benefit that this duplication delivers, much
less enough to tip the balance.
[...]
>I may not know the low-level details about many things, but
>I've spent enough of the last two years comparing and analyzing the
>behavior of drivers to mean it when I say I will not consider patches of
>that type. :)
Sophomore. :)
Seriously, though, if embed a common structure in device_class
and bus_type and consolidate the code that way, that may suffice, at
least if I can add the equivalent of struct intf_data for device
drivers so that certain carefully written drivers to be allowed to
attach to devices that already have another device (and perhaps the
equivalent of intf_data might facilitate support for things like my
ATI All-In-Wonder conglomeration).
Adam J. Richter __ ______________ 575 Oroville Road
adam@yggdrasil.com \ / Milpitas, California 95035
+1 408 309-6081 | g g d r a s i l United States of America
"Free Software For The Rest Of Us."
^ permalink raw reply [flat|nested] 7+ messages in thread
end of thread, other threads:[~2002-12-21 10:35 UTC | newest]
Thread overview: 7+ messages (download: mbox.gz follow: Atom feed
-- links below jump to the message on this page --
2002-12-19 19:36 RFC: bus_type and device_class merge (or partial merge) Adam J. Richter
2002-12-19 20:37 ` Patrick Mochel
2002-12-19 22:44 ` Adam J. Richter
2002-12-19 23:37 ` Greg KH
2002-12-20 4:29 ` Patrick Mochel
-- strict thread matches above, loose matches on Subject: below --
2002-12-21 9:00 Adam J. Richter
2002-12-21 10:43 Adam J. Richter
This is a public inbox, see mirroring instructions
for how to clone and mirror all data and code used for this inbox
{kind=link}